Mathematics Subject GRE Workshop
Agenda
- Description of Mathematics Subject GRE
- Topics it covers
- Exam logistics
- Recommended resources
- Study techniques/tips
- Review of topics + sample problems
What is the Mathematics Subject GRE?
- Different from the Math section of the General GRE
- Required of graduate student applicants to many Math Ph.D. programs
- Tests a breadth of undergraduate topics
Topics
- Calculus (50%)
- Single Variable
- Multivariable
- Differential Equations
“Algebra” (25%)
- Linear Algebra
- Abstract Algebra
- Number Theory
Mixed Topics (25%)
- Real Analysis
- Logic / Set Theory
- Discrete Mathematics
- Point-Set Topology
- Complex Analysis
- Combinatorics
- Probability
Logistics
- Multiple choice, 5 choices
- 66 questions, 170 minutes
- No downside to guessing
- Only offered 3x/year
- Need to register ~2 months in advance
References
Garrity, All the Mathematics You Missed (But Need to Know for Graduate School)

Good high-level overview of undergrad topics.
The Princeton Review, Cracking the Math GRE Subject Test
“Calculus: The Greatest Hits”, good breadth.
Shallow treatment of Algebra, Real Analysis, Topology, Number Theory.
Five Official Practice Exams (with Solutions)
- GR 1268
- GR 0568
- GR 9367
- GR 8767
- GR 9768
All old and significantly easier than exams in recent years.
Aim for 90th percentile in $< 2$ hours.
General Tips
Math-Specific Tips
- Focus on lower div
- For Calculus, focus on speed: median $\leq 1$ minute
- Drill a lot of problems
- Seriously, a lot.
- Seriously.
- Should memorize formulas and definitions
- No time to rederive!
- Save actual exams as diagnostic tools
Study Tips
- Start early
- Steady practice paced over 3-9 months is 100x more effective than 1 month of cramming
- Speed is important
- Spaced repetition, e.g. Anki
- Replicate exam conditions
- Build mental stamina
- i.e. 2-3 hours of uninterrupted problem solving
- Self care!!
- Sleep
- Eat right
Single Variable Calculus
Differential
- Computing limits
- Showing continuity
- Computing derivatives
- Rolle’s Theorem
- Mean Value Theorem
- Extreme Value Theorem
- Implicit Differentiation
- Related Rates
- Optimization
- Computing Taylor expansions
- Computing linear approximations
Integral
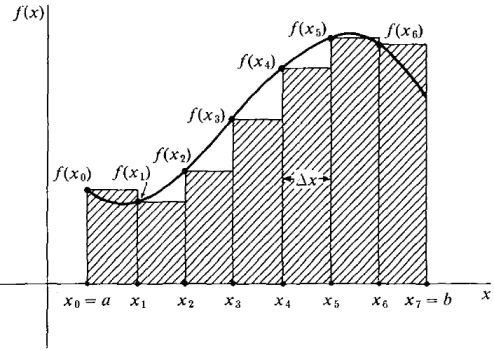
- Riemann sum definition of the integral
- The fundamental theorem of Calculus (both forms)
- Computing antiderivatives
- $u\dash$substitutions
- Partial fraction decomposition
- Trigonometric Substitution
- Integration by parts
- Specific integrands
- Computing definite integrals
- Solids of revolution
- Series (see real analysis section)
Computing Limits
- Tools for finding $\lim_{x\to a} f(x)$, in order of difficulty:
- Plug in: equal to $f(a)$ if $f \in C^0(N_\varepsilon(a))$
- Algebraic Manipulation
- L’Hopital’s Rule (only for indeterminate forms $\frac 0 0, \frac \infty \infty$)
- For $\lim f(x)^{g(x)} = 1^\infty, \infty^0, 0^0$, let $L = \lim f^g \implies \ln L = \lim g \ln f$
- Squeeze theorem
- Take Taylor expansion at $a$
- Monotonic + bounded (for sequences)
Use Simple Techniques
When possible, of course.
The Fundamental Theorems of Calculus
First form is usually skimmed over, but very important!
FTC Alternative Forms
Commuting $D$ and $I$
Commuting a derivative with an integral
(Derived from chain rule)
Set $$ a(x) = a, b(x) = b, f(x,t) = f(t) \implies \dd{}{x} f(t) = 0, $$ then commute to derive the FTC.Applications of Integrals
- Solids of Revolution
- Disks: $A = \int \pi r(t)^2 ~dt$
- Cylinders: $A = \int 2\pi r(t)h(t) ~dt$
- Arc Lengths
- $ds = \sqrt{dx^2 + dy^2},\qquad L = \int ~ds$
Series
There are 6 major tests at our disposal:
- Comparison Test
- $a_n < b_n \and \sum b_n < \infty \implies \sum a_n < \infty$
- $b_n < a_n \and \sum b_n = \infty \implies \sum a_n = \infty$
- You should know some examples of series that converge and diverge to compare to.
- Ratio Test
$$R =\lim_{n\to\infty} \abs{\frac{a_{n+1}}{a_n}}$$- $R < 1$: absolutely convergent
- $R > 1$: divergent
- $R = 1$: inconclusive
More Series
- Root Test
$$R = \limsup_{n \to \infty} \sqrt[n]{\abs{a_n}}$$- $R < 1$: convergent
- $R > 1$: divergent
- $R = 1$: inconclusive
- Integral Test
$$f(n) = a_n \implies \sum a_n < \infty \iff \int_1^\infty f(x) dx < \infty$$
More Series
- Limit Test
$$\lim_{n\to\infty}\frac{a_n}{b_n} = L < \infty \implies \sum a_n < \infty \iff \sum b_n < \infty$$ - Alternating Series Test
$$a_n \downarrow 0 \implies \sum (-1)^n a_n < \infty$$
Advanced Series
- Cauchy Criteria:
- Let $s_k = \sum_{i=1}^k a_i$ be the $k\dash$th partial sum, then
$$\sum a_i \text{ converges } \iff \theset{s_k} \text{ is a Cauchy sequence},$$
- Let $s_k = \sum_{i=1}^k a_i$ be the $k\dash$th partial sum, then
- Weierstrass $M$ Test:
$$\sum_{n=1}^\infty \abs{\norm{f_n}_\infty} < \infty \implies \\ \exists f\in C^0 \suchthat \sum_{n=1}^\infty f_n \rightrightarrows f$$- i.e. define $M_k = \sup\theset{f_k(x)}$ and require that $\sum \abs{M_k} < \infty$
- “Absolute convergence in the sup norms implies uniform convergence”
Multivariable Calculus
General Concepts
- Vectors, div, grad, curl
- Equations of lines, planes, parameterized curves
- And finding intersections
- Multivariable Taylor series
- Computing linear approximations
- Multivariable optimization
- Lagrange Multipliers
- Arc lengths of curves
- Line/surface/flux integrals
- Green’s Theorem
- The divergence theorem
- Stoke’s Theorem
Geometry in $\RR^3$
Lines
Planes
Distances to lines/planes: project onto orthogonal complement.
Tangent Planes/Linear Approximations
Let $S \subseteq \RR^3$ be a surface. Generally need a point $\vector{p} \in S$ and a normal $\vector{n}$.
Key Insight: The gradient of a function is normal to its level sets.
i.e. it is the zero set of some function $f:\RR^3 \to \RR$
- $\nabla f$ is a vector that is normal to the zero level set.
- So just write the equation for a tangent plane $\inner{\vector n}{\vector x - \vector p_0}$.
Tangent Planes/Linear Approximations
-
Let $f(x, y, z) = g(x,y) - z$, then
$$\vector p \in S \iff \vector p \in \theset{[x,y,z] \in \RR^3 \mid f(x,y, z) = 0}.\\$$ -
Then $\nabla f$ is normal to level sets, compute $\nabla f = [\dd{}{x}g, \dd{}{y}g, -1]$
-
Proceed as in previous case.
Optimization
Single variable: solve $\dd{}{x} f(x) = 0$ to find critical points $c_i$ then check min/max by computing $\dd{^2}{x^2}f(c_i)$.
Multivariable: solve $\nabla f(\vector x) = 0$ for critical points $\vector c_i$, then check min/max by computing the determinant of the Hessian:
Optimization
Lagrange Multipliers:
- Generally a system of nonlinear equations
- But there are a few common tricks to help solve.
Multivariable Chain Rule

Multivariable Chain Rule
To get any one derivative, sum over all possible paths to it:
Subscripts denote variables held constant while differentiating.
Linear Approximation
Just use Taylor expansions.
Single variable case:
Multivariable case:
Linear Algebra
Big Theorems
-
Rank Nullity:
$$\abs{\ker(A)} + \abs{\im(A)} = \abs{\mathrm{domain}(A)}$$ -
Fundamental Subspace Theorems
$$\im(A) \perp \ker(A^T), \qquad \ker(A) \perp \im (A^T)$$ -
Compute
- Determinant, trace, inverse, subspaces, eigenvalues, etc
- Know properties too!
-
Definitions
- Vector space, subspace, singular, consistent system, etc
Fundamental Spaces
- Finding bases for various spaces of $A$:
-
$\mathrm{rowspace} A/ \im A^T \subseteq \RR^n$
- Reduce to RREF, and take nonzero rows of $\mathrm{RREF}(A)$.
-
$\mathrm{colspace} A / \im A \subseteq \RR^m$:
- Reduce to RREF, and take columns with pivots from original $A$.
-
Fundamental Spaces
-
$\mathrm{nullspace}(A) / \ker A$:
- Reduce to RREF, zero rows are free variables, convert back to equations and pull free variables out as scalar multipliers.
-
Eigenspace:
- Recall the equation:
$$\lambda \in \spec(A) \iff \exists \vector v_\lambda \suchthat A\vector v_\lambda = \lambda \vector v_\lambda$$ - For each $\lambda \in \spec(A)$, compute $\ker (\lambda I - A)$
- Recall the equation:
Big List of Equivalent Properties
Let $A$ be an $n\times n$ matrix representing a linear map $L: V \to W$
TFAE:
- $A$ is invertible and has a unique inverse $A^{-1}$
- $A^T$ is invertible
- $\det(A) \neq 0$
- The linear system $A\vector{x} = \vector{b}$ has a unique solution for every $b\ \in \RR^m$
- The homogeneous system $A\vector{x} = 0$ has only the trivial solution $\vector{x} = 0$
- $\rank(A) = \dim(W) = n$
- i.e. $A$ is full rank
- $\mathrm{nullity}(A) \definedas \dim(\mathrm{nullspace}(A)) = \dim(\ker L) = 0$
Big List of Equivalent Properties
- $A = \prod_{i=1}^k E_i$ for some finite $k$, where each $E_i$ is an elementary matrix.
- $A$ is row-equivalent to the identity matrix $I_n$
- $A$ has exactly $n$ pivots
- The columns of $A$ are a basis for $W \cong \RR^n$
- i.e. $\mathrm{colspace}(A) = \RR^n$
- The rows of $A$ are a basis for $V \cong \RR^n$
- i.e. $\mathrm{rowspace}~(A) = \RR^n$
- $\left(\mathrm{colspace}~(A)\right)^\perp = \left(\mathrm{rowspace}~(A^T)\right)^\perp = \theset{\vector 0}$
- Zero is not an eigenvalue of $A$.
- $A$ has $n$ linearly independent eigenvectors
Various Other Topics
- Quadratic forms
- Projection operators
- Least Squares
- Diagonalizability, similarity
- Canonical forms
- Decompositions ($QR, VDV^{-1}, SVD,$ etc)
Ordinary Differential Equations
Easy IVPs
- Should be able to immediately write solutions to any initial value problem of the form
$$\sum_{i=0}^n \alpha_i y^{(i)}(x) = f(x)$$- Just write the characteristic polynomial.
Easy IVPs
- Example: A second order homogeneous equation
$$ay'' + by' + cy = 0 \mapsto ax^2 + bx + c = 0$$- Two distinct roots: $$y(x) = c_1 e^{r_1 x} + c_2 e^{r_2 x}$$
- One real root: $$y(x) = c_1 e^{rx} + c_2 x e^{rx}$$
- Complex conjugates $\alpha \pm \beta i$: $$y(x) = e^{\alpha x}(c_1 \cos \beta x + c_2 \sin \beta x)$$
- Two distinct roots:
More Easy IVPs
-
The Logistic Equation
$$\frac{dP}{dt} = r\left( 1 - \frac{P}{C} \right)P \implies P(t) = \frac{P_0}{\frac{P_0}{C} + e^{-rt}(1 - \frac{P_0}{C})}$$ -
Separable
$$\frac{dy}{dx} = f(x)g(y) \implies \int \frac{1}{g(y)}dy = \int f(x) dx + C$$
More Easy IVPs
- Systems of ODEs
$$\vector{x}'(t) = A\vector{x}(t) + \vector{b}(t) \implies \vector{x}(t) = \sum_{i=1}^n c_i e^{\lambda_i t}~\vector{v}_i$$
for each eigenvalue/eigenvector pair $(\lambda_i, \vector v_i)$.
Less Common Topics
- Integrating factors
- Change of Variables
- Inhomogeneous ODEs (need a particular solution)
- Variation of parameters
- Annihilators
- Undetermined coefficients
- Reduction of Order
- Laplace Transforms
- Series solutions
- Special ODEs
- Exact
- Bernoulli
- Cauchy-Euler
Topics: Number Theory
Definitions
-
The fundamental theorem of arithmetic:
$$n\in\mathbb Z \implies n = \prod_{i=1}^n p_i^{k_i}, \quad p_i \text{ prime}$$ -
Divisibility and modular congruence:
$$x\mid y \iff y = 0 \mod x \iff \exists c \suchthat y = xc$$ -
Useful fact:
$$x = 0 \mod n \iff x = 0 \mod p_i^{k_i} ~\forall i$$
(Follows from the Chinese remainder theorem since all of the $p_i^{k_i}$ are coprime)
Definitions
- GCD, LCM
$$xy = \gcd{(x,y)}~\mathrm{lcm}{(x,y)} \\ d\mid x \and d\mid y \implies d \mid \gcd(x,y) \\ \quad \and \gcd(x,y) = d\gcd(\frac x d, \frac y d)$$- Also works for $\mathrm{lcm}(x,y)$
- Computing $\gcd(x,y)$:
- Take prime factorization of $x$ and $y$,
- Take only the distinct primes they have in common,
- Take the minimum exponent appearing
The Euclidean Algorithm
Computes GCD, can also be used to find modular inverses:
Back-substitute to write $ax+by = \mathbf{r_{k+2}} = \gcd(a,b)$.
(Also works for polynomials!)
Definitions
-
Coprime
$$a\text{ is coprime to } b \iff \gcd(a,b) = 1$$ -
Euler’s Totient Funtion
$$\phi(a) = \abs{\theset{x \in \NN \suchthat x \leq a \and \gcd(x,a) = 1}}$$- Computing $\phi$:
$$\gcd(a,b) = 1 \implies \phi(ab) = \phi(a)\phi(b) \\ \phi(p^k) = p^k - p^{k-1}$$ - Just take the prime factorization and apply these.
- Computing $\phi$:
Definitions
Know some group and ring theoretic properties of $\ZZ/n\ZZ$
- $\ZZ/n\ZZ$ is a field $\iff n$ is prime.
- So we can solve equations with inverses: $ax = b \mod n \iff x = a^{-1}b \mod n$
- But there will always be some units; in general,
$$\abs{(\ZZ/n\ZZ)^{\times}} = \phi(n)$$
and is cyclic when $n=1,2,4,p^k, 2p^k$
Chinese Remainder Theorem
The system
has a unique solution $x \mod \prod m_i$ iff $\gcd(m_i, m_j) = 1$ for each pair $i,j$.
Chinese Remainder Theorem
The solution is given by
Seems symbolically complex, but actually an easy algorithm to carry out by hand.
Chinese Remainder Theorem
Ring-theoretic interpretation: let $N = \prod n_i$, then
Theorems
-
Fermat’s Little Theorem and Euler’s Theorem
$$a^p = a \mod p \\ p \not\mid a \implies a^{p-1} = 1 \mod p \\ \text{and in general, } \\ a^{\phi(p)} = 1 \mod p$$ -
Wilson’s Theorem
$$n \text{ is prime } \iff (n-1)! = -1 \mod n$$
Advanced Topics
- Mobius Inversion
- Quadratic residues
- The Legendre/Jacobi Symbols
- Quadratic Reciprocity
Topics: Abstract Algebra
Definitions
- Group, ring, subgroup, ideal, homomorphism, etc
- Order, Center, Centralizer, orbits, stabilizers
- Common groups: $S_n, A_n, C_n, D_{2n}, \ZZ_n,$ etc
Structure
-
Structure of $S_n$
- e.g. Every element is a product of disjoint cycles, and the order is the lcm of the order of the cycles.
- Generated by (e.g.) transpositions
- Cycle types
- Inversions
- Conjugacy classes
- Sign of a permutation
-
Structure of $\ZZ_n$
$$\ZZ_{pq} = \ZZ_p \oplus \ZZ_q \iff (p,q) = 1$$
Basics
Group Axioms
- Closure: $a,b \in G \implies ab \in G$
- Identity: $\exists e\in G \mid a\in G \implies ae = ea = a$
- Associativity: $a,b,c \in G \implies (ab)c = a(bc)$
- Inverses: $a\in G \implies \exists b \in G \mid ab =ba = e$
One step subgroup test:
Useful Theorems
Cauchy’s Theorem
- If $\abs{G} = n = \prod p_i^{k_i}$, then for each $i$ there exists a subgroup $H$ of order $p_i$.
The Sylow Theorems
- If $\abs{G} = n = \prod p_i^{k_i}$, for each $i$ and each $1 \leq k_j \leq k_i$ then there exists a subgroup $H_{i,j}$ for all orders $p_i^{k_j}$.
- Note: partial converse to Cauchy’s theorem.
Classification of Abelian Groups
Suppose $\abs{G} = n = \prod_{i=1}^m p_i^{k_i}$
$G$ decomposes into a direct sum of groups corresponding to its prime factorization. For each component, you take the corresponding prime, write an integer partition of its exponent, and each unique partition yields a unique group.
Ring Theory
-
Definition: $(R, +, \times)$ where $(R, +)$ is abelian and $(R, times)$ is a monoid.
-
Ideals: $(I, +) \leq (R, +)$ and $r\in R, x\in I \implies rx \in I$
-
Noetherian: $I_1 \subseteq I_2 \subseteq \cdots \implies \exists N \suchthat I_N = I_{N+1} = \cdots$
- (Ascending chain condition)
-
Differences between prime and irreducible elements
- Prime: $p \mid ab \implies \mid a \or p \mid b$
- Irreducible: $x \text{ irreducible } \iff \not\exists a,b\in R^\times \suchthat p = ab$.
-
Various types of rings and their relations:
Topics: Real Analysis
- Properties of Metric Spaces
- The Cauchy-Schwarz Inequality
- Definitions of Sequences and Series
- Testing Convergence of sequences and series
- Cauchy sequences and completeness
- Commuting limiting operations:
- $[\frac{\partial}{\partial x}, \int dx]$
- Uniform and point-wise continuity
- Lipschitz Continuity
Big Theorems
- Completeness: Every Cauchy sequence in $\RR^n$ converges.
- Generalized Mean Value Theorem
$$f,g\text{ differentiable on } [a,b] \implies \\ \exists c\in[a,b] : \left[f ( b ) - f ( a ) \right] g' ( c ) = \left[g ( b ) - g ( a )\right] f' ( c )$$- Take $g(x) = x$ to recover the usual MVT
- Bolzano-Weierstrass: every bounded sequence in $\RR^n$ has a convergent subsequence.
- Heine-Borel: in $\RR^n, X$ is compact $\iff X$ is closed and bounded.
Topics: Point-Set Topology
General Concepts
- Open/closed sets
- Connected, disconnected, totally disconnected, etc
- Mostly topics related to metric spaces
Useful Facts
- Topologies are closed under
- Arbitrary unions: $$U_j \in \mathcal{T} \implies \union_{j\in J} U_i \in \mathcal{T}$$
- Finite intersections: $$U_i \in \mathcal{T} \implies \intersect_{i=1}^n U_i \in \mathcal{T}$$
- Arbitrary unions:
- In $\RR^n$, singletons are closed, and thus so are finite sets of points
- Useful for constructing counterexamples to statements
Topics: Complex Analysis
General Concepts
- $n\dash$th roots:
$$e^{\frac{ki}{2\pi n}}, \qquad k = 1, 2, \cdots n-1$$ - The Residue theorem:
$$\oint_C f(z)~dz = 2\pi i \sum_k \mathrm{Res}(f, z_k)$$- Exams often include one complex integral
- Need a number of other theorems for actually computing residues
Topics: Discrete Mathematics + Combinatorics
General Concepts
- Graphs, trees
- Recurrence relations
- Counting problems
- e.g. number of nonisomorphic structures
- Inclusion-exclusion, etc
Example Problems
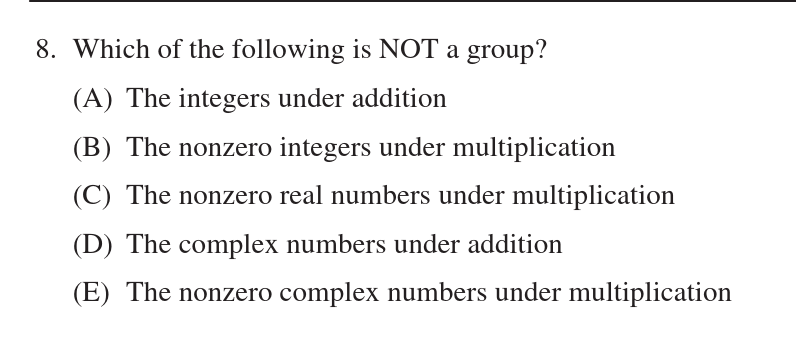
Example Problem 1
Example Problem 1
C, because $\ZZ-\theset{0}$ lacks inverses
(Would need to extend to $\QQ$)
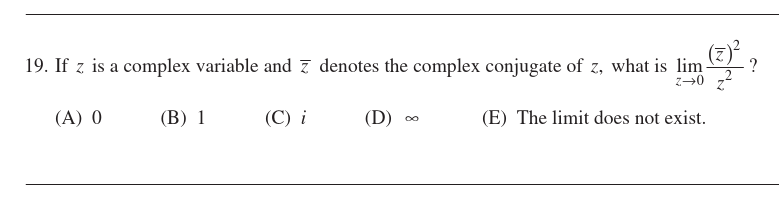
Example Problem 2
Example Problem 2
So E, because the limit needs to be path-independent.
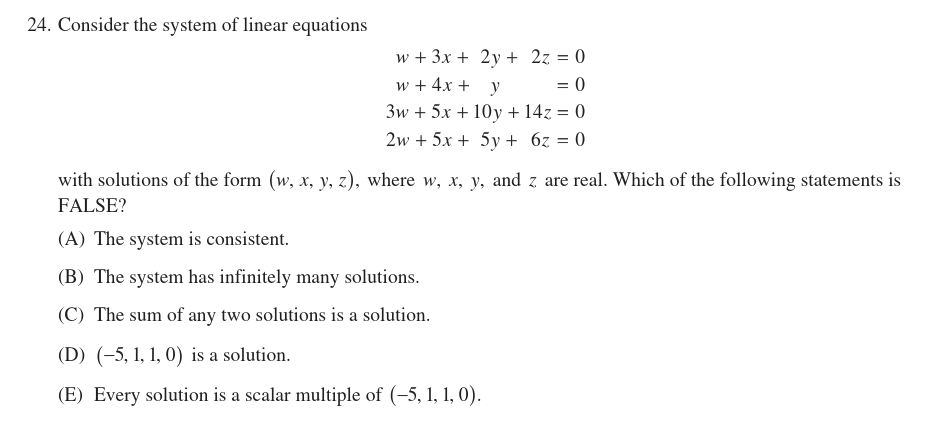
Example Problem 3
Example Problem 3
Don’t row-reduce or invert! Just one computation
Example Problem 3
So D, A are true. C is true because it’s a homogeneous system. B is true because $A\vector x = 0 \implies A (t\vector x) = tA\vector x = 0$ which means $t\vector x$ is a solution for every $t$. By process of elimination, E must be false.
Example Problem 4
Example Problem 4
Note $N_{\frac{1}{2}}(x) = \theset{x}$, so every singleton is open. Any subset of $\ZZ$ is a countable union of its singletons, so every subset of $\ZZ$ is open. The complement any set is one such subset, so every subset is clopen. The inverse image of any subset of $\RR$ under any $f:\ZZ \to \RR$ is a subset of $\ZZ$, which is open, so every such $f$ is continuous. So E.