Interesting Topological Spaces in Algebraic Geometry
D. Zack Garza
Intro/Motivation
Space, but Which One?
You run into a “space” in the wild. Which one is it?
How many possible spaces could it be?
How much information is needed to specify our space uniquely?
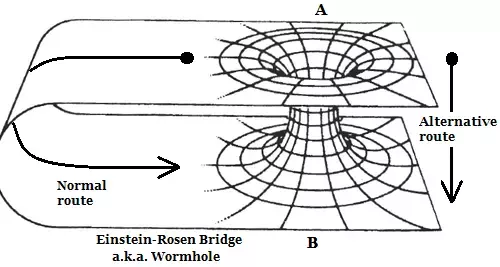
One Motivation: Physics
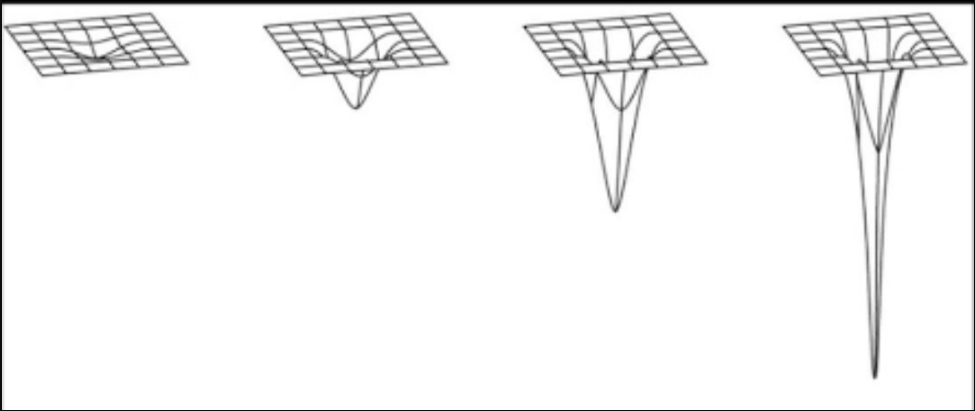
Does your space have genus?Does your space have curvature or singularities?
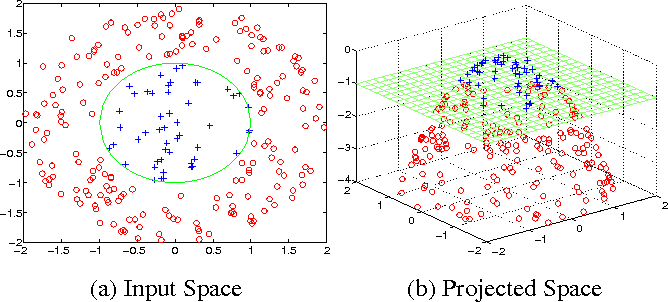
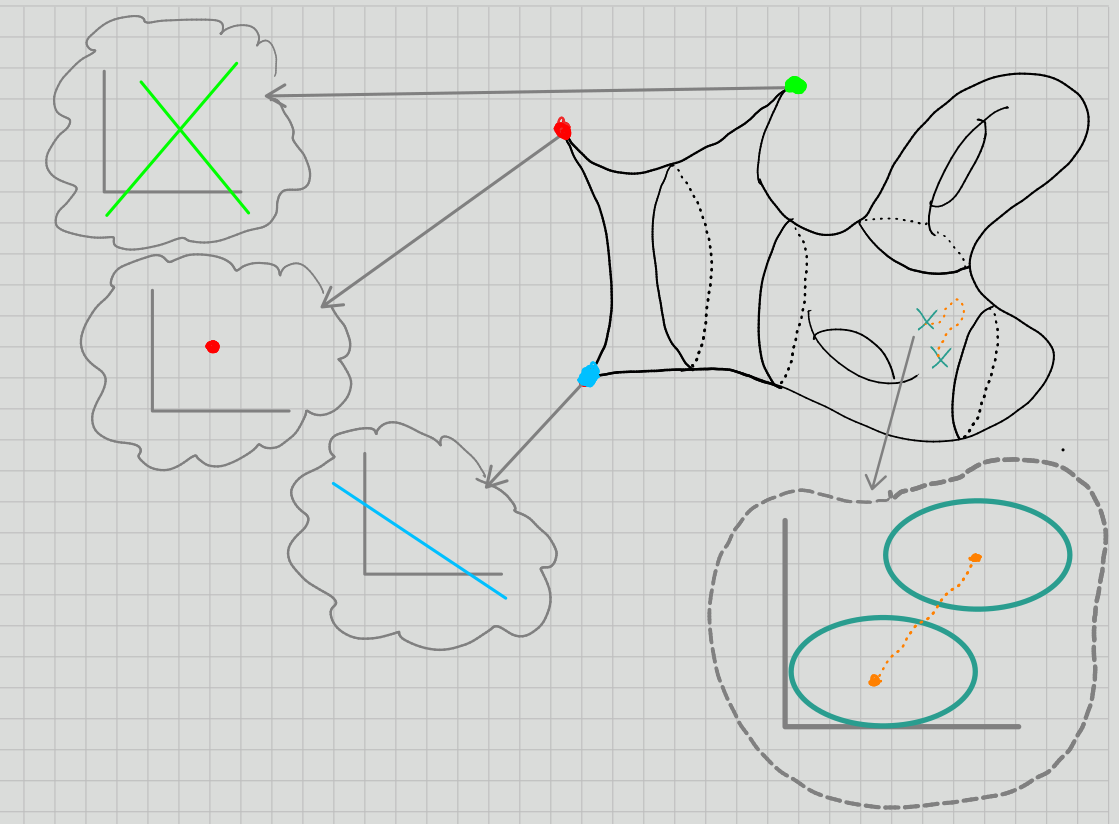
Another Application: Data
Can you only measure low-dimensional slices/projections?
Possible to fit data to a high-dimensional manifold
Makes clustering/grouping easier
(Here, slice with a hyperplane)
Does your space abstractly parameterize something else?
Extract info about an entire family of objects and how they vary.
Also useful for outlier detection!
Where to Start
What structure does your space have?
What can you “measure” locally?
How might it vary in ways you can’t measure?
Important question before attempting to classify:
What does “space” mean?
Need to pick a category to work in.
What does “which” mean?
How to distinguish? Need an equivalence relation!
Q1: Types of Spaces
Plan: compare classification theorem in topology and algebraic geometry
Hopefully see some fun spaces along the way!
But first: address classification and the notion of “sameness”
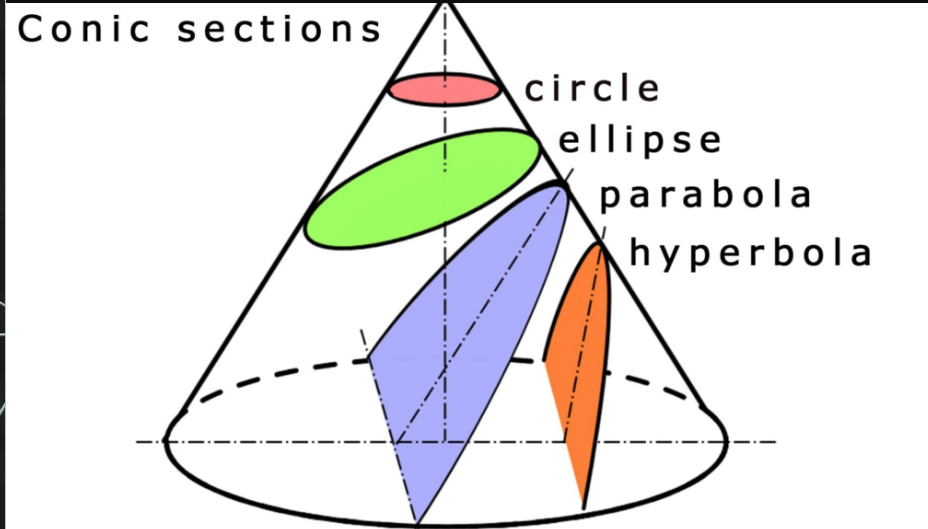
The Greeks: Conics
Early classification efforts: conic sections.
Apollonius, 190 BC, Ancient Greeks
Key idea: realize as intersection loci in bigger space
(Projectivize \(\mathbb{R}^2\).)
A conic is specified by 6 parameters:
\[\begin{align*}
A x^{2}+B x y+C y^{2}+D x+E y+F=0 \\ \\
Q :=\left(\begin{array}{ccc}
A & B / 2 & D / 2 \\
B / 2 & C & E / 2 \\
D / 2 & E / 2 & F
\end{array}\right), \quad \mathbf{x} = [x, y, 1] \\
\implies \mathbf{x}^t Q \mathbf{x} = 0
\end{align*}\]
\(\det(Q)\)
Conic
\(<0\)
Hyperbola
\(=0\)
Parabola
\(>0\)
Ellipse
Each conic is a variety
Can obtain every conic by "modulating* 6 parameters.
\(\mathbb{R}^6\): too much information: scaling by a nonzero \(\lambda \in \mathbb{R}\) yields the same conic, so reduce the space \[
[A, B, C, D, E, F]\in \mathbb{R}^6 \mapsto [A: B: C: D: E: F] \in \mathbb{RP}^5
.\]
Important point: \(\mathbb{RP}^5\) is a projective variety and a smooth manifold! Tools available:
Dimension (what does a generic point look like?)
Tangent and cotangent spaces, differential forms
Measures, metrics, volumes, integrals
Intersection theory (Bezout’s Theorem!), subvarieties, curves
Linear algebra and Combinatorics (enumerative questions)
We can imagine a moduli space of conics that parameterizes these:
Moduli Space of Conics
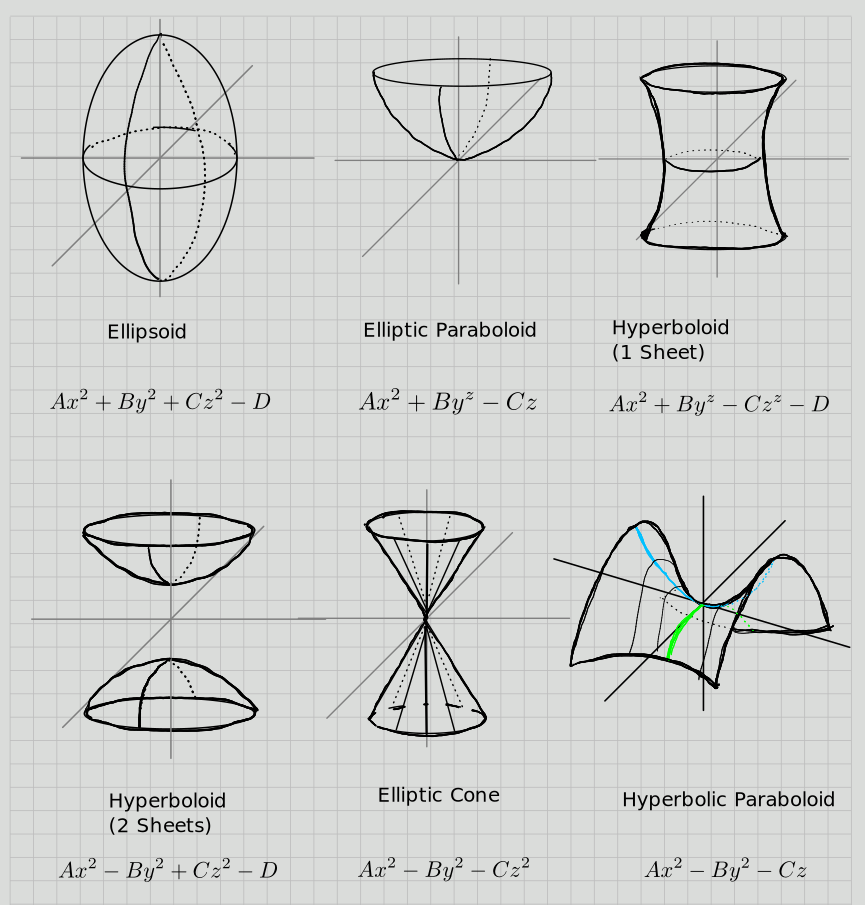
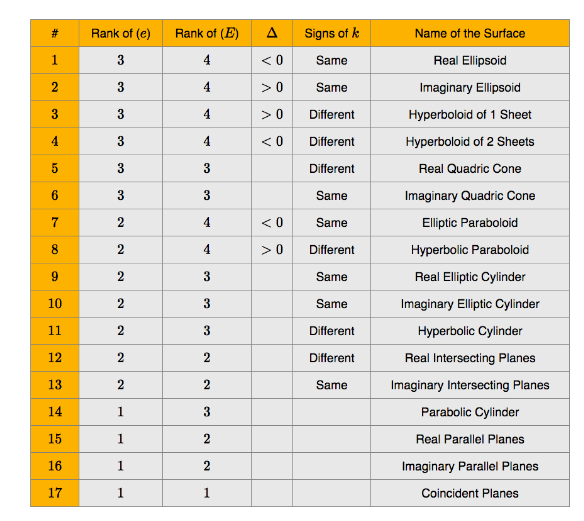
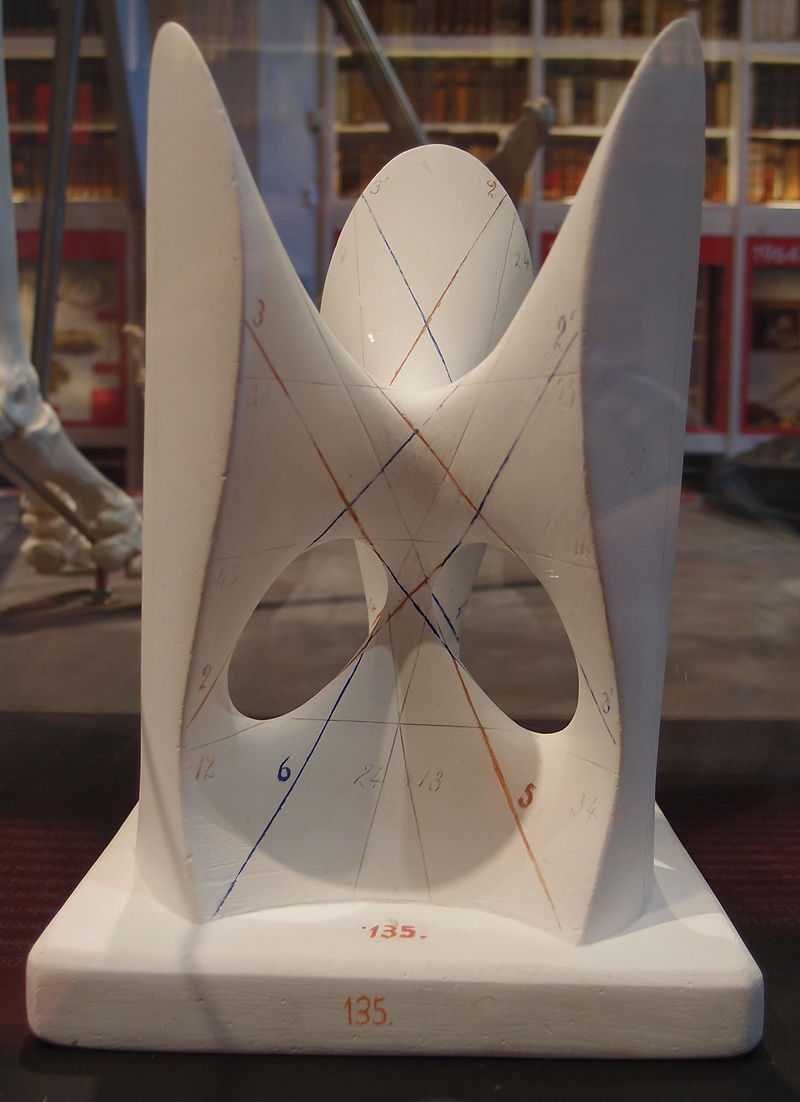
Quadrics
Some Calc III review:
Image
General form:
\[\begin{array}{l}\scriptsize
A x^{2}+B y^{2}+C z^{2}+2 F y z+2 G z x+2 H x y+2 P x+2 Q y+2 R z +D=0 \\ \\
\text{Setting}\,\,
E:= \left[\begin{array}{llll}
A & H & Q & P \\
H & B & F & Q \\
G & F & C & R \\
P & Q & R & D
\end{array}\right]\,\,
e:= \left[\begin{array}{lll}
A & H & G \\
H & B & F \\
G & F & C
\end{array}\right] \\
\Delta := \operatorname{det}(E)
\end{array}\]
(discriminants), the equation becomes \(\mathbf x^t E \mathbf x = 0\) and we have a classification:
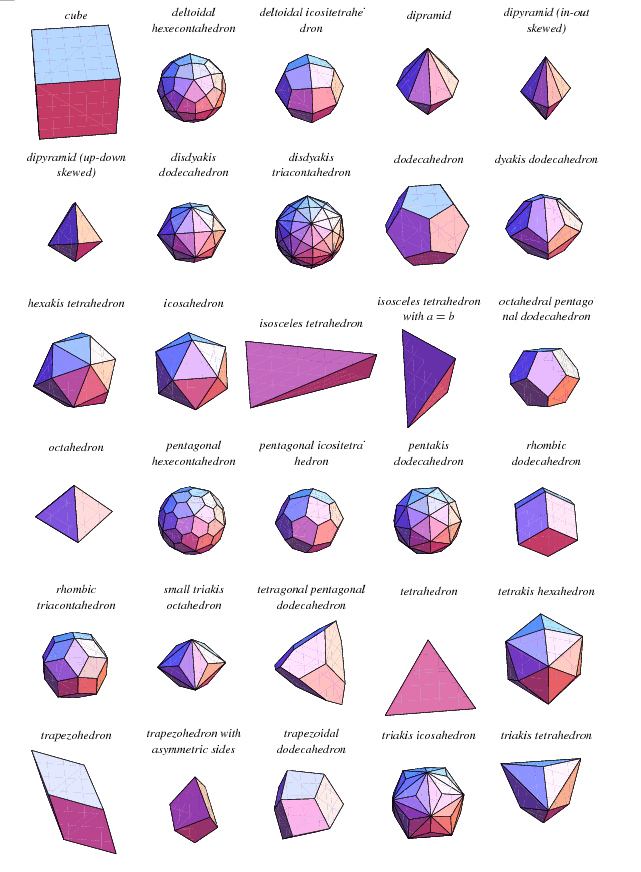
Classification of quadrics
What is the moduli space? It sits inside \(\mathbb{R}^{10}\), possibly \(\mathbb{RP}^{9}\) but not in the literature!
Automorphisms
Problem: infinitely many points in these moduli spaces correspond to the same “class” of conic
Partition a Moduli Space
How to address: Klein’s Erlangen program, understand the geometry of a space by understanding its structure-preserving automorphisms.
For topological spaces: a Lie group acting on the space.
Can then “mod out” by the appropriate morphisms to (hopefully) get finitely many equivalence classes
What Does “Space” Mean?
Some Setup
Algebraic Variety: Irreducible ,zero locus of some family \(f\in \mathbb{k}[x_1, \cdots, x_n]\) in \(\mathbb{A}^n/\mathbb{k}\).
Equivalently, a locally ringed space \((X, \mathcal{O}_X)\) where \(\mathcal{O}_X\) is a sheaf of finite rational maps to \(\mathbb{k}\).
Projective Variety: Irreducible zero locus of some family \(f_n \subset \mathbb{k}[x_0, \cdots, x_n]\) in \(\mathbb{P}^n/\mathbb{k}\)
Admits an embedding into \(\mathbb{P}^\infty/\mathbb{k}\) as a closed subvariety.
Dimension of a variety: the \(n\) appearing above.
Genus 1: All of the form \(\mathbb{C}/\Lambda\), with a distinguished point \([0]\), i.e. an elliptic curve.
Has a topological group structure!
Genus \(\geq 2\): Complicated?
Doesn’t capture holomorphy type completely.
3-manifolds: Thurston’s Geometrization
Geometric structure: a diffeo \(M\cong \tilde M/\Gamma\) where \(\Gamma\) is a discrete Lie group acting freely/transitively on \(X\) (as in Erlangen program)
Decompose into pieces with one of 8 geometries:
Spherical \(\sim S^3\)
Euclidean \(\sim \mathbb{R}^3\)
Hyperbolic \(\sim \mathbb{H}^3\)
\(S^2\times \mathbb{R}\)
\(\mathbb{H}^2\times \mathbb{R}\)
\(\widetilde{\mathrm{SL}(2, \mathbb{R})}\)
“Nil”
“Sol”
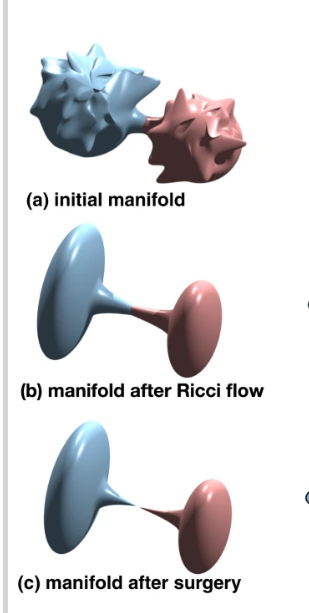
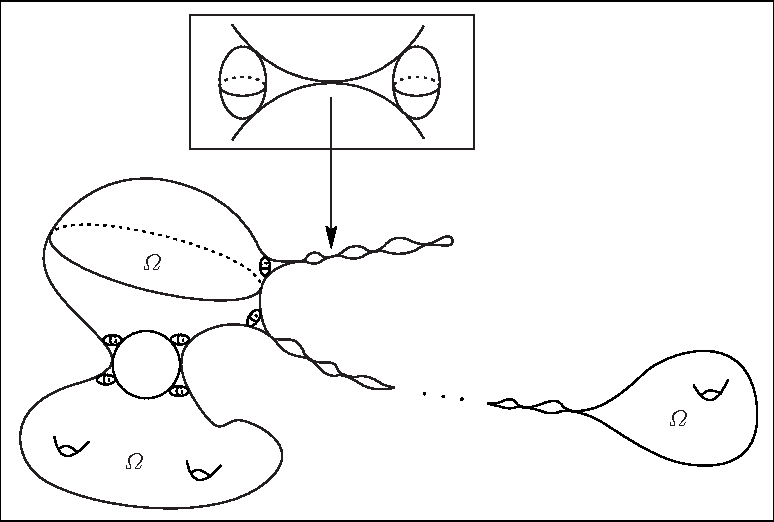
Proved by Perelman 2003, Ricci flow with surgery.
Ricci Flow with SurgeryMore Ricci Flow
4-manifolds: classified in the topological category by surgery, but not in the smooth category
Hard! Will examine special cases of Calabi-Yau
Open part of Poincaré Conjecture.
Dimension \(\geq 5\): surgery theory, strong relation between diffeomorphic and s-cobordant.
Types in bold: amenable to Algebraic Geometry. \(G2\) shows up in Physics!
Ricci-flat, i.e. Ricci curvature tensor vanishes
(Measures deviation of volumes of “geodesic balls” from Euclidean balls of the same radius)
Classification in Algebraic Geometry
Enriques-Kodaira Classification
Work over \(\mathbb{C}\) for simplicity, take all dimensions over \(\mathbb{C}\).
Minimal model program: classifying complex projective varieties.
Stratify the “moduli space” of varieties by \(\mathbb{k}-\)dimension.
Dimension 1:
Smooth Algebraic curves = compact Riemann surfaces, classified by genus
Roughly known by Riemann: moduli space of smooth projective curves \(\mathcal{M}_g\) is a connected open subset of a projective variety of dimension \(3g-3\).
We’ll come back to these!
Dimension 2:
Smooth Algebraic Surfaces: Hard. See Enriques classification.
Setting of classical theorem: always 27 lines on a cubic surface!
Example Clebsch surface, satisfies the system \[
\begin{array}{l}
x_{0}+x_{1}+x_{2}+x_{3}+x_{4}=0 \\ \\
x_{0}^{3}+x_{1}^{3}+x_{2}^{3}+x_{3}^{3}+x_{4}^{3}=0
\end{array}
\]
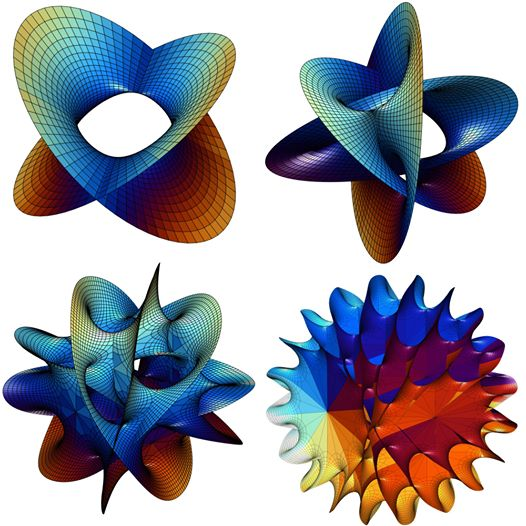
Clebsch Surface with 27 Lines
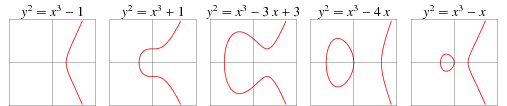
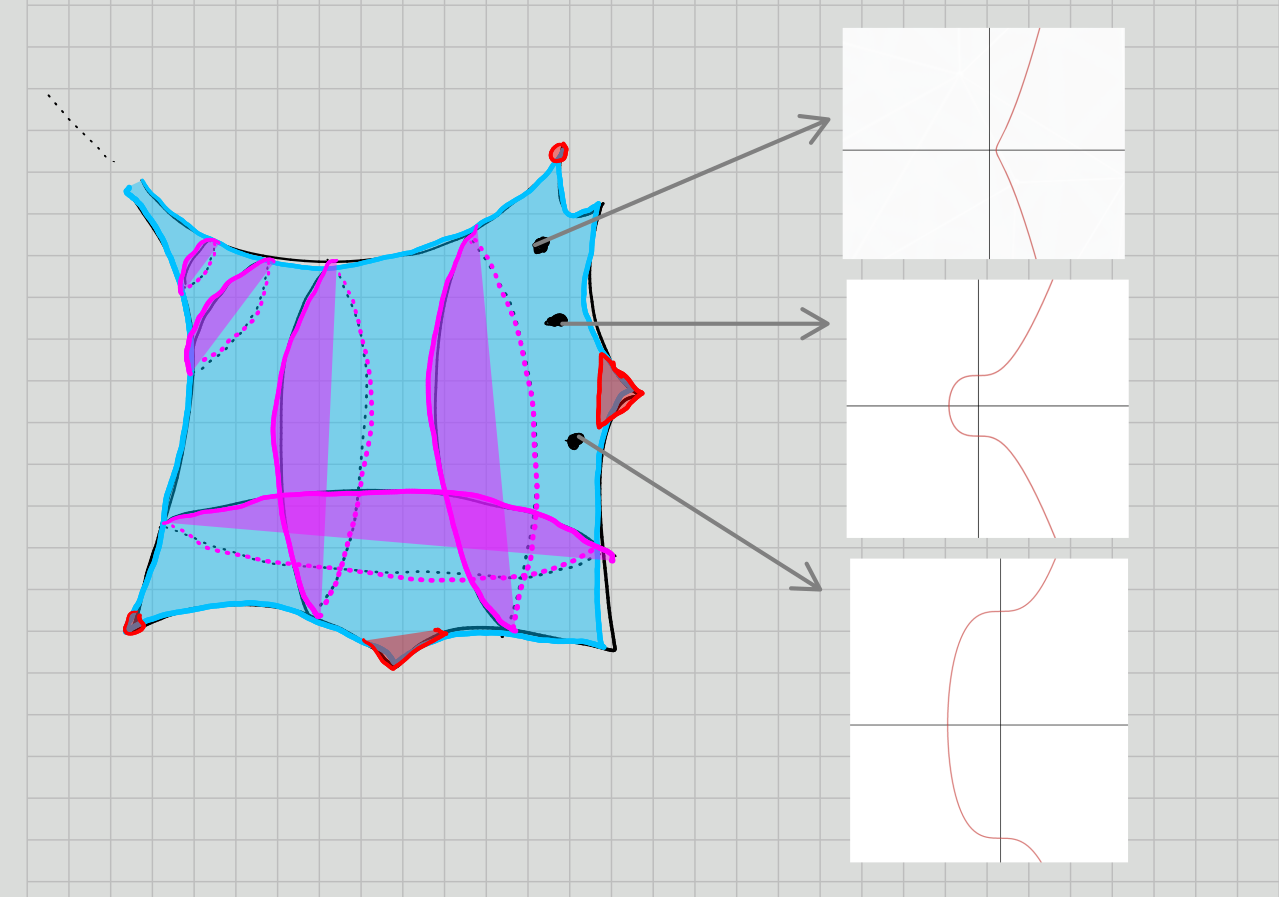
Interesting Space: Elliptic Curves
Equivalently, Riemann surfaces with one marked point.
Equivalently, \(\mathbb{C}/\Lambda\) a lattice, where homothetic lattices (multiplication by \(\lambda \in \mathbb{C}- \{0\}\)) are equivalent.
Generalize to \(\mathbb{C}^n/\Lambda\) to obtain abelian varieties.
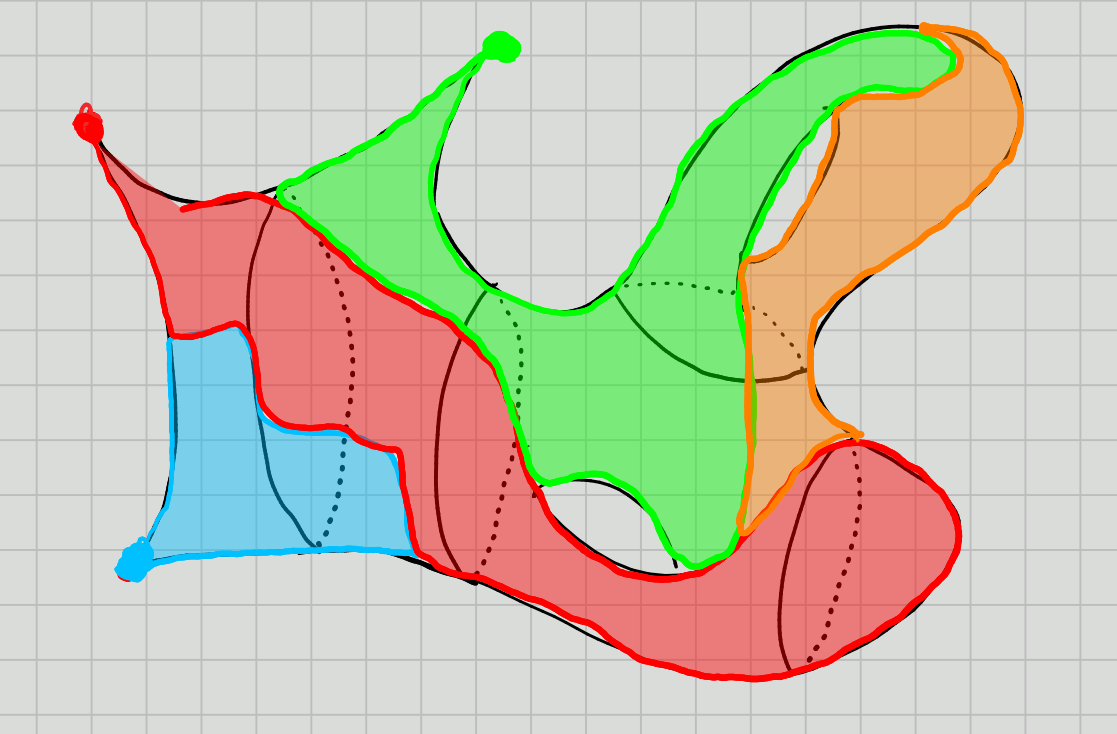
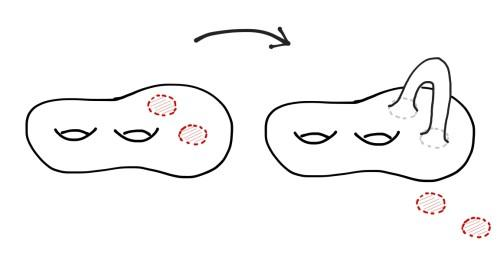
Elliptic Curves as Plane CurvesComplex Curves as Real Surfaces
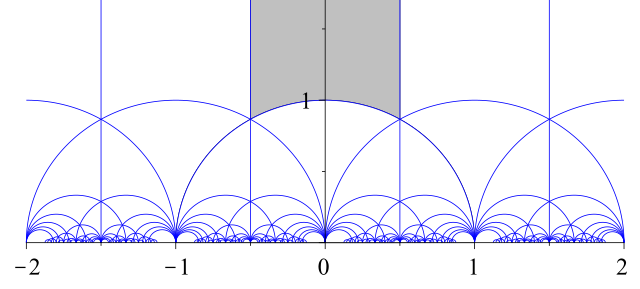
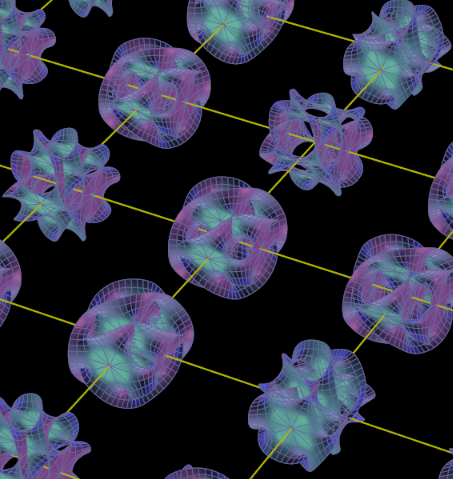
Interesting Space: Moduli of Elliptic Curves
\(\mathcal{M}_g\): the moduli space of compact Riemann surfaces (curves) of genus \(g\), i.e. elliptic curves.
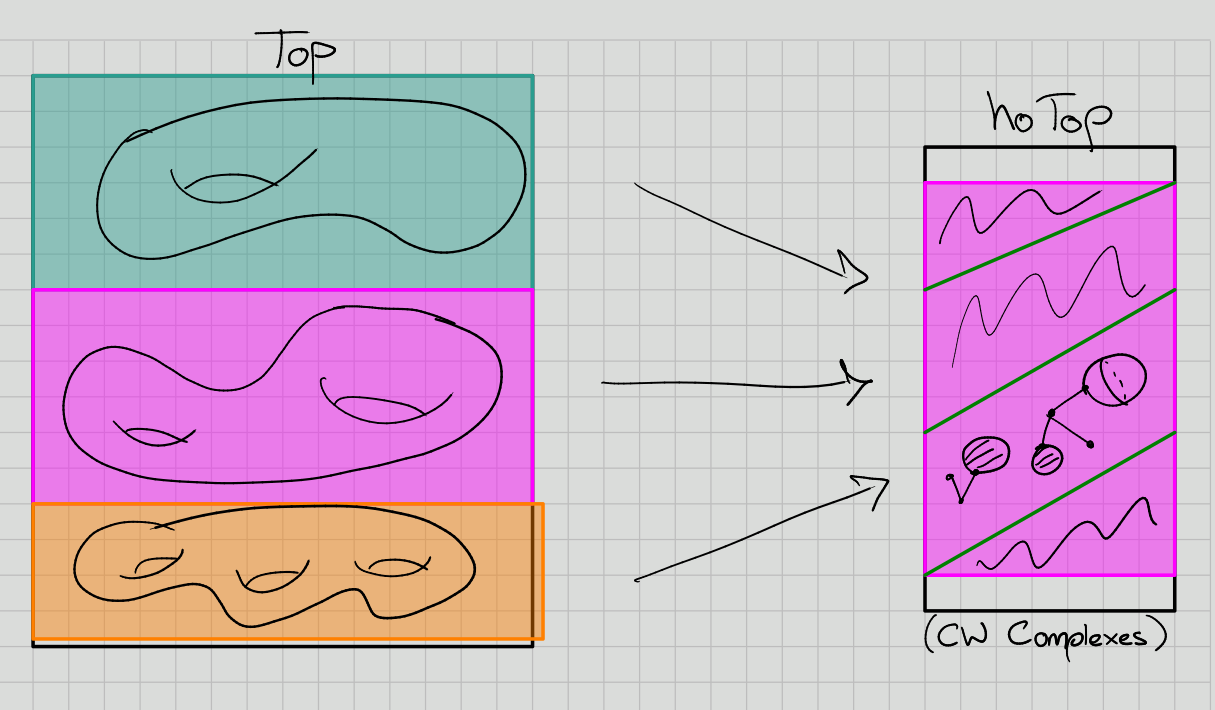
Approximately the Actual Space
Dimension 2: Algebraic Surfaces
Generalize to Moduli Space of Surfaces?
Definition: Kodaira Dimension
\(X\) has some canonical sheaf \(\omega_X\), you can take some sheaf cohomology and get a sequence of integers (plurigenera)